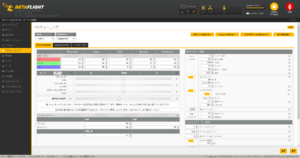
セットアップ
設定の最後にお手持ちの水平器を使って水平に保った状態で『水平キャリブレーション』を押します。
『設定をリセット』は押さないように注意してください。
基本設定
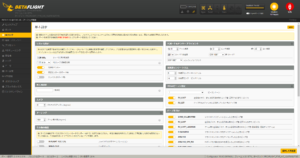
FCの角度によって『第1ジャイロ』を『CW180°』にしてあります。
電源・バッテリー
『1セルあたりの最小電圧』『最大電圧』『警告電圧』をそれぞれ設定します。
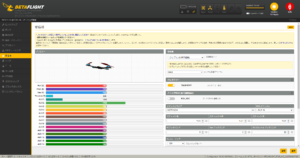
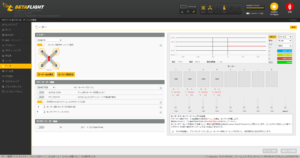
PIDチューニング
PID Profile 設定
『P』
風が吹いた時に姿勢を維持する。
高い場合・・・ジャイロハンチング。引っ張られる。バタつく。
低い場合・・・不安定になるが、アクロ時の動きは良くなる。
『I』
姿勢を戻すときの反応速度。
高い場合・・・小刻みに揺れる。スティックの反応に敏感になる。
低い場合・・・鈍くなる。フラフラする。
『D』
戻した後、止める力。
高い場合・・・バタつく。
低い場合・・・ダラーンと止まる。
『D MAX』
『D』よりも10上げておく。
『Feed forward』
スティックに対する反応。
『強度』
標準は50。
水平に戻る力。
低くするとじわーっと戻る。
『角度上限』
アングル時の機体が傾く角度。
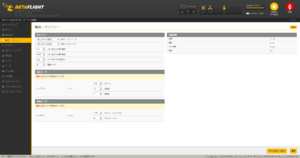
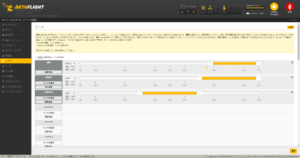
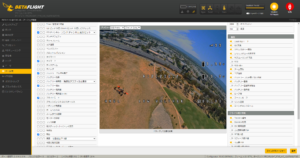
Rateprofile設定
『RC Rate』

標準は1.0。
撮影時は0.7くらいに下げる。
『Rate』
標準は0.7。
0にすると線が真っすぐになり、動きがリニアになる。
フリップしたいときには0.7~1.1の間で調整する。
『RC Expo』
標準は0。
スティックを中央にしたときの操作を鈍くする。
『TPA』『TPA区切り点』
高速になった時、ジャイロ感度を下げる。
画像の設定の場合、1350になったら65%ずつPIDを下げるということ。
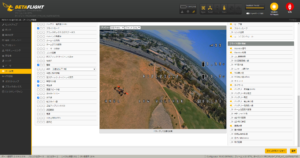
受信機
スティックコマンド時に関係する。
フタバ『SFHSS』の場合、センターが1520になる。
高、低、それぞれ400ずつ増減させる。
モード
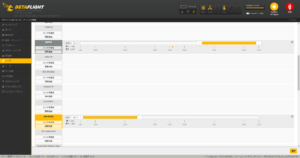

モーター
『モーターアイドル』
標準は5.5。
マイクロドローンは6~8。
右下の『リスクを認識し~』のチェックを入れて、モーター確認。
左上の番号と違ったら『モーター並び替え』で変更。
回転方向が違ったら『モーター回転方向』で変更。
OSD設定
『CLIコマンドライン』
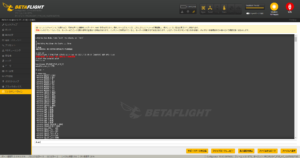
下の入力欄に『dump』と入力し、Enterを押す。
一番上まで移動し、『# name:』以下をコピーして『メモ帳』などに保存しておく。
データが消えてしまった時に、保存したコマンドを入力してEnter。
『save』と入力してEnterを押せば元に戻る。
以上、WDA流設定です。ご参考になれば幸いです。